Приложение к свидетельству № 62618
об утверждении типа средств измерений
Лист № 1
Всего листов 5
ОПИСАНИЕ ТИПА СРЕДСТВА ИЗМЕРЕНИЙ
Системы измерений вибрационные балансировочные ВИБРОЛАБ
Назначение средства измерений
Системы измерений вибрационные балансировочные ВИБРОЛАБ (далее по тексту -
системы) предназначены для измерения амплитуды виброперемещения в составе балансиро-
вочных станков с целью последующего расчета значения и угла дисбаланса, корректирующей
массы.
Описание средства измерений
Принцип действия систем основан на преобразовании вибрации опорных стоек балан-
сировочного станка в электрический сигнал, пропорциональный виброперемещению, с даль-
нейшим расчетом в автоматическом режиме значения и угла дисбаланса для балансируемого
изделия (ротора), а также значения корректирующей массы.
Измерение амплитуды виброперемещения осуществляется при помощи пьезоэлектри-
ческих и (или) емкостных акселерометров, устанавливаемых по одному в каждой из опорных
стоек балансировочного станка. В качестве акселерометров могут применяться преобразовате-
ли виброизмерительные пьезоэлектрические АК 317 (рег. № ФИФ 48307-11), акселерометры
АТ 1105 (рег. № ФИФ 49398-12), а также другие пъезоэлектрические или емкостные акселеро-
метры утвержденных типов. В дальнейшем в основном блоке происходит цифровая фильтрация
сигналов, поступающих от первичных преобразователей, определение частоты вращения рото-
ра и текущего углового положения балансируемого ротора, а также выделение амплитуд и фаз
колебаний на частоте вращения ротора и расчет значений дисбалансов и их углов в каждой
плоскости ротора по методу векторных коэффициентов влияния, расчет корректирующих масс.
Дополнительно системы имеют функцию измерения частоты вращения ротора при по-
мощи лазерного отметчика оборотов, а также функцию контроля угла поворота ротора с ис-
пользованием датчика угла (инкрементальный энкодер), устанавливаемого на привод баланси-
ровочного станка.
Конструктивно системы представляют из себя основной блок, в едином корпусе кото-
рого размещены дисплей, измерительный модуль, блок питания, материнская плата, вентилятор
и жесткий диск, а также устанавливаемые на опорах и приводе станка первичные преобразова-
тели, соединяемые с основным блоком линиями связи.
Системы применяются для целей динамической и статической балансировки жестких,
квазижестких и гибких роторов в составе дорезонансных или зарезонансных вертикальных или
горизонтальных балансировочных станков с одной, двумя, тремя или четырьмя плоскостями
коррекции. Системы позволяют определять начальный дисбаланс перед балансировкой и оста-
точный дисбаланс после проведения балансировки с оцениванием его соответствия установ-
ленным допустимым значениям.
Системы содержат базу данных балансируемых изделий с набором установленных ис-
ходных параметров. Имеется возможность пополнения базы данных, а также ручного ввода ис-
ходных параметров для расчета дисбаланса и корректирующих масс.
Вкачествеустройствавводаивыводаинформациииспользуетсяжидко-
кристаллический сенсорный дисплей, расположенный на передней части основного блока. Ре-
зультаты измерений и расчетов сохраняются в энергонезависимой памяти (жестком диске) и
могут быть переданы по интерфейсам USB (записаны на съемный носитель) и по локальной
компьютерной сети (протокол TCP-IP). Также системы поддерживают вывод информации о
проведенной балансировке на принтеры, подключаемые по USB и TCP-IP.
Системы имеют возможность управления частотно-регулируемыми приводами асин-
хронных электродвигателей по протоколу Modbus.
Лист № 2
Всего листов 5
По устойчивости к воздействию температуры и влажности окружающего воздуха сис-
темы соответствуют условиям УХЛ 4.2 по ГОСТ 15150-69.
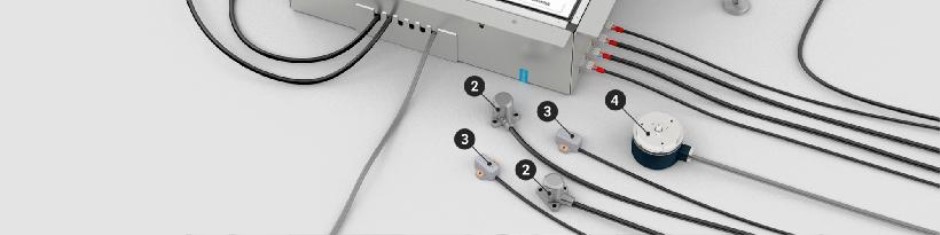
1 - основной блок; 2 - акселерометры АК 317; 3 - акселерометры АТ 1105; 4 - датчик угла;
5 - отметчик оборотов лазерный
Рисунок 1 - Общий вид систем
1-4 - легкоразрушаемые наклейки производителя; 5 - наклейка производителя.
Рисунок 2 - Места опломбирования
Корпус систем пломбируется легкоразрушаемыми наклейками производителя в 4 местах.
Лист № 3
Всего листов 5
Программное обеспечение
Метрологически значимая часть программного обеспечения (ПО) систем находится в
микропроцессоре, прошивка которого осуществляется при изготовлении систем. Наличие ме-
ханической защиты не позволяет считать или модифицировать ПО в процессе эксплуатации.
Конструкция СИ исключает возможность несанкционированного влияния на ПО СИ и
измерительную информацию.
Таблица 1 - Идентификационные данные ПО
Идентификационные данные (признаки)Значение
Идентификационное наименование ПО ВИБРОЛАБ-ПО
Номер версии (идентификационный номер) ПО 4.х
Цифровой идентификатор ПО не используется
Алгоритм вычисления цифрового идентификатора ПО -
Другие идентификационные данные (если имеются)-
где х - число, идентифицирующее номер версии метрологически незначимой части ПО.
Защита ПО от непреднамеренных и преднамеренных изменений соответствует уровню
«высокий» согласно Р 50.2.077-2014.
Метрологические и технические характеристики
от 1 до 4*
от 0,1 до 1000
±3
Таблица 2
Количество измерительных каналов виброперемещения, шт
Диапазон измерений амплитуды виброперемещения, мкм
Пределы допускаемой относительной погрешности измере-
ний амплитуды виброперемещения **, %
Диапазон измерений частоты вращения ротора, об/мин
Пределы допускаемой погрешности измерений частоты вра-
щения ротора, об/мин
Диапазон определяемого удельного дисбаланса, г∙мм/кг (мкм)
Диапазон рабочих частот, Гц
Потребляемая мощность, Вт, не более
Габаритные размеры основного блока, (ш×в×г)мм, не более
Масса основного блока, кг, не более
Напряжение сетевого питания, В
220
от 180 до 30000
±(1+0,0025 n),
где n - число оборотов ротора
от 0,5 до 500
от 3 до 500
100
430×370×125
15
+
10%
-
15%
Диапазон рабочих температур, °Сот +10 до +35
Средняя наработка на отказ, ч, не менее 40000
Средний срок службы, лет 25
* - количество измерительных каналов виброперемещения определяется при заказе
** - приведены для основного блока без учета погрешности акселерометров (суммарная по-
грешность измерительного канала виброперемещения для каждого типа акселерометров
может быть определена как квадратный корень из суммы квадратов погрешности акселеро-
метров и погрешности основного блока системы)
Знак утверждения типа
наносится полиграфическим методом на наклейку, размещаемую на задней панели основного
блока, а также на титульный лист руководства по эксплуатации и паспорта методом печати.
Лист № 4
Всего листов 5
Поверка
осуществляется в соответствии с документом МП 4277-001-38447005-2015 «Системы измере-
ний вибрационные балансировочные ВИБРОЛАБ. Методика поверки», утвержденным
ФБУ «Ростовский ЦСМ» 27.04.2016 г.
Основные средства поверки:
- генератор сигналов произвольной формы 33220А (рег. № ФИФ 62209-15) (1 - 2·10
7
) Гц,
(1·10
-3
- 10) В, ПГ ±1 %;
- мультиметр цифровой 34410А (рег. № ФИФ 62209-15) (1·10
-4
- 1·10
3
) В, ПГ ±0,015 %.
Знак поверки в виде наклейки наносится в паспорт при первичной поверке и в свиде-
тельство о поверке при периодической поверке.
Сведения о методиках (методах) измерений
приведены в разделе 1.4 руководства по эксплуатации.
Нормативные и технические документы, устанавливающие требования к системам изме-
рений вибрационным балансировочным ВИБРОЛАБ
ГОСТ 20076-2007 Вибрация. Станки балансировочные. Характеристики и методы их
проверки
ГОСТ Р 8.800-2012 Государственная система обеспечения единства измерений. Государ-
ственная поверочная схема для средств измерений виброперемещения, виброскорости и виб-
роускорения в диапазоне частот от 1*10
-1
до 2*10
4
Гц
ГОСТ 8.129-2013 Государственная система обеспечения единства измерений. Государ-
ственная поверочная схема для средств измерений времени и частоты
ТУ 4277-001-38447005-2015 Системы измерений вибрационные балансировочные
ВИБРОЛАБ. Технические условия
Изготовитель
Общество с ограниченной ответственностью «Энсет» (ООО «Энсет»)
ИНН 6165177184
Адрес: 344000, г. Ростов-на-Дону, пл. Гагарина, 1
Тел. (863) 221-50-05, 273-87-71, 273-84-62
Факс (863) 273-84-62
Е-mail:
Комплектность средства измерений
В комплект поставки входят:
1. Система измерений вибрационная балансировочная ВИБРОЛАБ в
составе:
- основной блок1 шт.
- акселерометры4 шт.*
- отметчик оборотов лазерный1 шт.
- датчик угла1 шт.
2.Руководство по эксплуатации РЭ 4277-001-38447005-20151 экз.
3.Паспорт ПС 4277-001-38447005-20151 экз.
4.Методика поверки МП 4277-001-38447005-20151 экз.
* - количество и тип акселерометров определяется при заказе
Лист № 5
Всего листов 5
Испытательный центр
Федеральное бюджетное учреждение «Государственный региональный центр стандарти-
зации, метрологии и испытаний в Ростовской области»
Адрес: 344010, г. Ростов-на-Дону, пр. Соколова, 58
тел.:(863) 264-19-74, 290-44-88, факс: (863) 291-08-02, 290-44-88
Е-mail:
,
Аттестат аккредитации ФБУ «Ростовский ЦСМ» по проведению испытаний средств изме-
рений в целях утверждения типа № 30042-13 от 11.12.2013 г.
Заместитель
Руководителя Федерального
агентства по техническому
регулированию и метрологииС.С. Голубев
М.п.« ___ » _______________ 2016 г.
Готовы поверить данное средство измерений.
Поверка средств измерений.